
王树森深度强化学习基础笔记
参考资料
基本概念
随机变量Random Variable
- a variable whose values depend on outcomes of a random event.
- 随机变量,表示一个事件所有可能的结果的集合,用大表示,表示概率
举例一枚硬币,则有:
- 用x表示随机变量的一个观测值,x表示一个数没有随机性
概率密度函数Probability Density Function (PDF)
- PDF provides a relative likelihood that value of the random variable would equal that sample.
- 概率密度函数表示随机变量在某个确定位置的取值点附近的可能性
Example: Gaussian distribution
- It is a continuous distribution.高斯分布
\begin{align}p(x) = \frac{1}{\sqrt{2\pi\sigma^2}}exp(-\frac{(2-\mu)^2}{2\sigma^2}).\end{align}
-
其中表示均值,表示标准差
-
概率密度中,将随机变量的定义域记为
-
当p为连续的概率分布
\begin{align} \int_\chi p(x)dx = 1\end{align}
-
当p为离散的概率分布
\begin{align} \sum_{x\in\chi} p(x)dx = 1\end{align}
Expectation
-
函数的期望表示为,对其与概率密度函数的乘积做定积分,表示为如下公式:
-
连续性
\begin{align} \mathbb{E}[f(X)] =\int_\chi p(x)f(x)dx\end{align}
-
离散性
\begin{align} \mathbb{E}[f(X)] =\sum_{x\in\chi} p(x)f(x)dx\end{align}
Random Sampling
随机抽样
随机抽三个颜色的球,概率分别为0.2,0.5,0.3
form numpy.random import choice |
Terminology
state: s (this frame),某一时刻的状态
Action:动作,Action a {left,right,up}
Agent:代理,也被指为智能体是动作执行者,机器人、智能体
policy:也叫 函数,根据观测到的状态来做出决策,从而控制agent运动,在数学上是概率密度函数,数学上表示为:
\begin{align} \pi:(s,a)->[0,1]:\pi(a|s) = \mathbb{P}(A =a|S = s). \end{align}
其中a是某一个动作,s表示当前状态,函数的结果为此时的概率
强化学习就是去构建policy函数,只要有了这样一个policy函数,计算机就会根据概率密度得出的概率做随机抽样,进而控制agent做出反应
reward: 用R表示,奖励,奖励定义的好坏影响强化学习的结果,奖励的定义是更具游戏中输赢的条件来设置的。强化学习的目标就是获得奖励的总和最高。
state transition:状态转移,状态转移通常具有随机性,符合马尔科夫链模型,状态转移的随机性是更具环境的变化来的,环境的变化对于强化学习是未知的,状态转移函数只有环境知道,用数学公式表示如下:
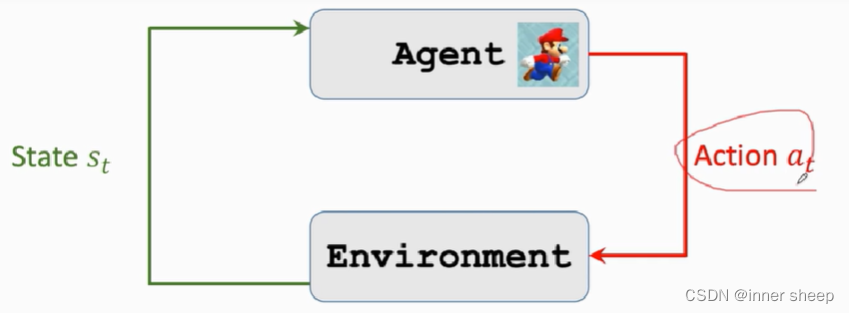
agent environment interaction
用游戏来举例,环境是游戏程序,agent是游戏角色。在游戏中,将当前屏幕显示的图片作为State ,agent会根据环境做出动作,做出动作之后,环境会更新状态。
agent做出动作之后环境会更新状态,并给agent响应的奖励
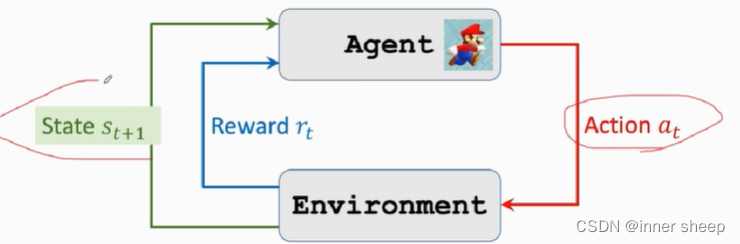
强化学习的两个随机性:
- agent的动作Action存在随机性
- 状态转移,当agent做出动作后,环境会发生状态转移,具有随机性,环境根据概率密度算出概率,再根据随机抽样得到下一个状态,数学公式如下:
Play the game using AI
- 通过强化学习构建出police函数
- 观测当前游戏的这一帧的状态State,S1,AI用police函数来算出动作action,a1(左,右,上,三选一)
- 环境生成下一个状态S2,并且给agent对应的奖励reward,r1
- AI将新的State S2作为输入,用policy函数算出动作action,a2
- …直到game结束
最终得到trajectory轨迹,包含每一步的[状态,动作,奖励],行成一个矩阵
Rewards and Returns
Return: 回报,cumulative future reward 即将连续的所有奖励reword求和,得到 表述为如下公式:
\begin{align} U_t = R_t + R_{t+1} + R_{t+2}+ R_{t+3}+... \end{align}
Discounted return: 折扣回报,对于未来的奖励和现在的奖励相比,更倾向于获得当前时刻的回报,并且越久远,奖励就要打折扣,因此对于连续时间下的折扣都有系数,系数为折扣率 ,表示为如下公式:
\begin{align} U_t = R_t + \gamma R_{t+1} + \gamma^{2}R_{t+2}+ \gamma^{3} R_{t+3}+... \end{align}
折扣率 是一个超参数,是我们可以根据实际情况进行调整的,对强化学习的效果有一定的影响。
回报是一个随机函数,随机性有两个来源:
-
执行的动作随机Action can be random
\begin{align} \mathbb{P}[A=a | S = s] = \pi(a|s). \end{align}
-
场景的新状态随机 New state can be random
\begin{align} \mathbb{P}[S' = s' | S = s,A =a] = p(s'|s,a). \end{align}
-
对于任意时刻的 $ i \ge tR_iS_i$ 和当前的动作
因此,对于表示为所有的R求和,即表示与未来所有的reward,即未来所有的动作和状态都有关系,这就是折扣回报的随机性来源
Value Functions
State-Value Function
Play games using reinforcement learning
控制AI的两种方式:
第一种,32·
- 提供一个policy函数
OpenAI Gym
 微信
微信
